
×

سلام
ورود و عضویت

اگر تا کنون در فرآیند طراحی و ساخت یک کوادکوپتر(یا مولتی روتور های دیگر) و انتخاب موتور های آن درگیر شده باشید، احتمالا خیلی خوب می دانید در مورد چه حرف می زنیم. بازار رنگارنگ موتورهای براش و براشلس با انواع توان ها، ولتاژ ها، اندازه ها، شرکت ها و …. مختلف سرتان را گیج می برد. 🙂
در مطلب امروز قصد داریم به این نتیجه برسیم که برعکس این تصور ما، گزینه های زیادی برای انتخاب کردن نداریم.
موتورهای الکتریکی برای کارکردن و چرخیدن به انرژی نیاز دارند. این انرژی می تواند به شکل های مختلفی به آن ها برسد. بسته به نوع طراحی موتور ها به چند دسته تقسیم می شوند. این موتور ها بر اساس قدرت رانش مغناطیسی(همان فرار کردن آهنربا ها از همدیگر) کار می کنند.

موتورهای جریان ثابت(Direct Current)
در این موتور ها جریان برق با روال ثابت و یکنواختی به طور دائمی به سیم پیچ های موتور می رسد و انرژی مورد نیاز آن ها را تامین می کند. شاید تا کنون فرار کردن دو تکه آهن ربا از همدیگر را دیده باشید. جریان ثابت برق با ایجاد میدان های مغناطیسی مثل همان آهنرباها موجب فرار سیم پیچ های داخل موتور و چرخش آن ها می شود.

موتورهای جریان متناوب(Alternating Current)
در این موتورها انرژی الکتریکی به شکل امواج رفت و برگشتی منتقل می شود. مثل تلمبه دستی دوچرخه که هم پایین بردن و هم بالاکشیدن دسته تلمبه در باد شدن تایر تاثیر دارد. در این نوع موتور هم رفت و برگشت جریان در یک حلقه دائما تکرار می شود و موجب چرخیدن موتور می شود. اساس کار این موتورها هم همان مثال فرار آهنرباها از همدیگر است.
نمی خواهیم زیاد وارد بحث های فنی و فرمول های خرچنگ قورباغه مهندسی برق شویم. به زبان آدمیزاد 😐 موتور ها طراحی های مختلفی دارند ولی همیشه لازم است تا یک جوری برق را به خوردشان بدهیم.

موتور براش(جاروبک دار)
بعضی موتور ها برای این برق را بگیرند نیاز به چیزی به نام جاروبک دارند. جاروبک همانطور که از اسمش معلوم است، وظیفه اش این است که مثل جارو دور محور موتور بچسبد و برق را در حین چرخیدن به روتور (همون قسمتی که می چرخه) برساند. این جاروبک معایبی هم دارد. مثل ساییدگی، جرقه زدن و محدودیت در سرعت موتور. ساییدن و جرقه زدن جاروبک موجب گرم شدن موتور و تلف شدن مقدار زیادی انرژی می شود. به همین علت در سرعت های بالا از این موتور ها کمتر استفاده می شود.
اگر چه ارزان قیمت بودن ساخت این موتورها موجب استفاده زیاد آن ها در همه جای زندگی ما شده است. ولی در موارد حساس و دقیق معمولا گزینه ی مطلوبی نیستند.
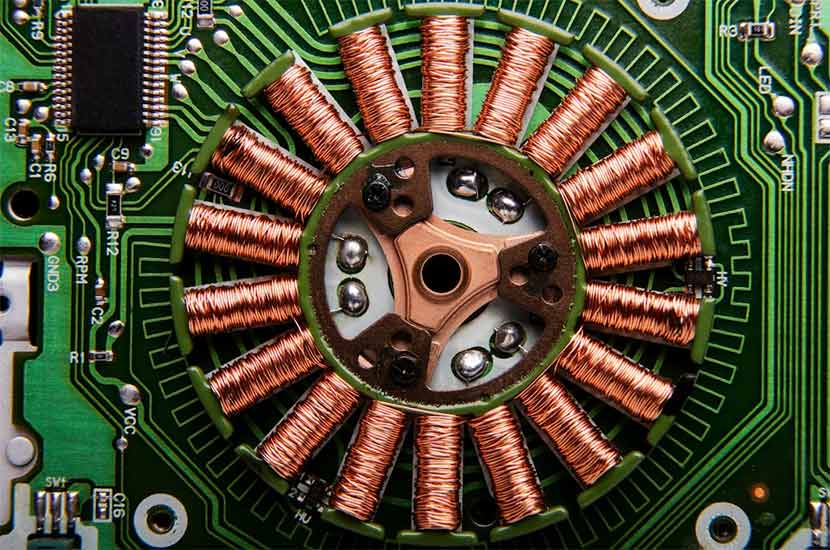
نوع دیگری از این موتورها به نام موتورهای بدون هسته(کورلس) وجود دارد که سرعت بسیار خوبی دارند. ولی باز هم مشکل داغ شدن و تحمل بار کم آن ها موجب استقبال نه چندان زیاد از این موتور ها شده است. در تصویر زیر می توانید ساختمان یک نمونه موتور کورلس را ببینید.


موتور براشلس
این موتورها همانطور که از اسمشان معلوم است جاروبک ندارند. به جای استفاده از برق برای ایجاد میدان مغناطیسی، در این موتور ها آهنربای دائمی وجود دارد. این موتورها معمولا دارای چرخش سریع تری نسبت به سایر موتور ها هستند. عدم استفاده از جاروبک در این موتور ها و دقت و قابلیت اطمینان بالا موجب می شود تا در مواردی که سرعت و دقت مهم است، به سراغ این موتور ها برویم.
موتورهای براشلس بازدهی بسیار بالایی دارند. به دلیل اصطکاک خیلی کم، مقدار بسیار ناچیزی از انرژی تلف می شود. در پهپادها به دلیل اهمیت بسیار بالای باتری ، این نکته اهمیت فوق العاده ای دارد.
معایب موتور های براشلس هم باید در نظر گرفت. این موتورها معمولا نیاز به یک مدار(برد) راه انداز دارند که به آن اسپید کنترلر گفته می شود. این موتور ها بسیار هزینه ساخت بالایی دارند و نیاز به اسپید کنترلر این هزینه را باز هم بالاتر می برد. در زیر یک اسپیدکنترلر ۴۰ آمپر زردرنگ را می توانید ببینید.

زمانی که نوبت به پرواز و ساخت یک پهپاد اسباب بازی، یا تجاری و صنعتی برسد، باید از میان موتورهای موجود انتخاب کنیم. برای ساخت پهپاد های سبک وزن و ارزان قیمت اسباب بازی معمولا از موتور های براش (کورلس) با کیفیت مناسب استفاده می شود. دلیل این کار وزن کم این پرنده ها و ارزان قیمت بودن این موتور هاست. در کاربردهای حرفه ای و تخصصی در ۹۰ درصد موارد از موتورهای براشلس با کیفیت بالا استفاده می شود. اگرچه این موتورها گران قیمت اند ولی قابلیت اطمینان بالایی دارند و سرعت و قدرت بسیار خوبی ارائه می دهند.
برای انتخاب موتور دو مولفه می تواند به ما کمک کند.
دور موتور که معمولا بر حسب RPM بیان می شود، یعنی این که موتور ما در سریع ترین حالت خود، در هر دقیقه چند دور می چرخد. هرچقدر دور موتور بیشتر باشد، معمولا مانورپذیری و نرمی حرکت پرنده بیشتر می شود.
قدرت یا همان تراست موتور، به زبان آدمیزاد 🙂 یعنی این که موتور ما در بیشترین قدرت خود، توان بلند کردن چه مقدار بار را از سطح زمین دارد. معمولا تراست را بر حسب کیلوگرم بیان می کنند.

برای انتخاب موتور باید چند مرحله را طی کنید. در مرحله اول باید بدانید پرنده ای که قرار است بسازید، در سنگین ترین حالت چند کیلوگرم وزن دارد. سپس این وزن را بر تعداد موتور ها تقسیم کنید. مثلا فرض کنیم پرنده شما ۶ موتوره(هگزاکوپتر) است و وزن پهپاد شما قرار است نهایتا ۳۰ کیلوگرم باشد. شما باید موتوری انتخاب کنید که تا ۵ کیلوگرم تراست داشته باشد.
البته بهتر است موتوری انتخاب کنید که تراست آن بیشتر از عدد محاسبه شده باشد(۷۰ تا ۱۰۰ درصد بیشتر). این کار کمک می کند تا خیالتان از بابت قدرت موتور ها راحت باشد. دقت کنید که تراست بیش از حد زیاد هم اشتباه است. موتور های قوی تر سنگین تر هستند و باتری بیشتری مصرف می کنند. این به خودی خود کار شما را خراب می کند.
همیشه شرکت تولید کننده یک ملخ(پراپلر) استاندارد را برای موتور معرفی می کند. دقت کنید که تراست موتور فقط با این ملخ خاص به مقدار گفته شده می رسد و در صورت استفاده از ملخ های دیگر ممکن است تراست کمتری بدهد.
استفاده از ملخ های بزرگ تر در ازای تراست بیشتر، جریان الکتریکی بیشتر به موتور تحمیل می کند. در صورت عبور از آستانه تحمل سیم های موتور موجب سوختن سیم پیچ موتور خواهد شد. بنابر این نمی توان بیشتر از حد مشخصی ابعاد ملخ را بالا برد. بهتر است به جای این کار از موتور قوی تری استفاده کنید.
موتورهای براشلس یک معیار KV دارند. این عدد نشان می دهد که نسبت دور موتور به حداکثر ولتاژ اعمال شده چه عددی است. به زبان ساده تر یعنی به ازای هر ولت ولتاژ چند دور چرخش داریم. موتورهایی که KV بالاتری دارند، سرعت بیشتری دارند و موتورهای با KV پایین معمولا قدرتی هستند. در صورتی که ۹۰ درصد این ضریب(معیار KV) را در ولتاژ باتری ضرب کنید، بیشترین دور موتور به دست آید.
هنگام انتخاب موتور براشلس حتما به ولتاژ و توان آن دقت کنید تا دچار ناهمخوانی در اجزای برق پرنده خود نشوید. دقت داشته باشید که هرگز از موتور براشلس در ولتاژ بیشتر از استاندارد کارخانه استفاده نکنید. این کار ممکن است منجر به سوختن موتور و آسیب رسیدن به سیستم برق شما شود.

معمولا موتورهای براشلس بزرگ تر قدرت بیشتری دارند. در میان موتورهای مختلف، موتورهای باریک تر، سرعتی و موتورهای پهن تر قدرتی هستند.
برخی شرکت های بزرگ در مدل های خاصی از موتورهای براشلس درایور(اسپیدکنترلر) داخلی قرار داده اند. این موجب بهبود عملکرد موتور ها می شود و ممکن است حتی برای شما ارزان تر تمام شود.
برای مطالعه مطالب بیشتر از دنیای پهپاد ها حتما از صفحه اینستاگرام ما دیدن فرمایید. برای مشاوره و خرید موتور دلخواه خود می توانید با همکاران ما در اوجیران تماس بگیرید.
[/et_pb_text][/et_pb_column] [/et_pb_row] [/et_pb_section]














